| University | Singapore University of Social Science (SUSS) |
| Subject | EAS401 Robotics Mechanics and Control Assignment |
EAS401 Robotics Mechanics and Control Assignment, SUSS, Singapore: Design a PYTHON program to compute the forward kinematics of PUMA 560.
Question 1 (15 marks)
Design a PYTHON program to compute the forward kinematics of PUMA 560. The DH parameters are listed in the following table:
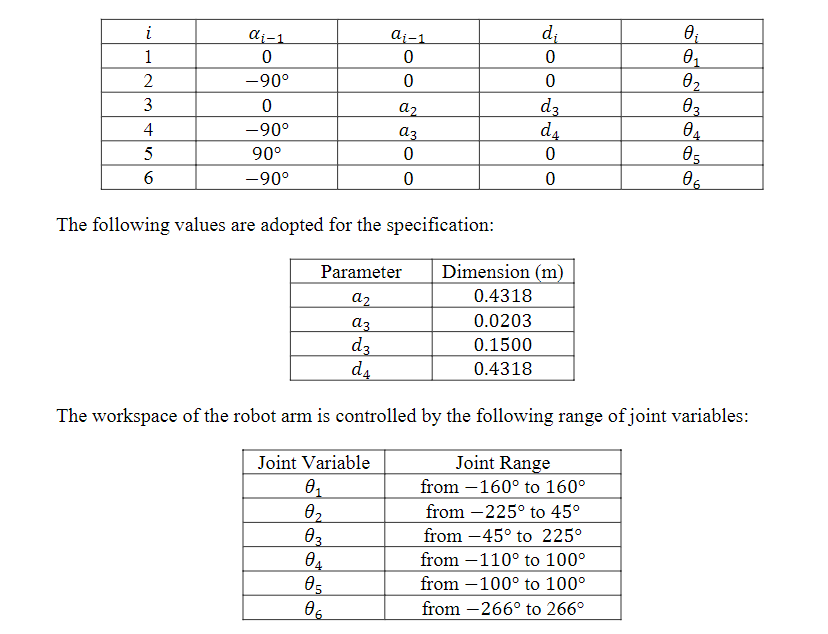
Requirements:
• The code should be able to take the joint variables and the pose (position and
orientation) of a position vector expressed in Frame {6} (i.e., 6 𝑃𝑃) as inputs, compute the forward kinematics mechanism, and output the pose of the position vector expressed in frame {0}.
• Experiment the code by using the following input values: [𝜃𝜃1, 𝜃𝜃2, 𝜃𝜃3, 𝜃𝜃4, 𝜃𝜃5, 𝜃𝜃6] = [0, −20°, −30°, 45°, 15°, 30°] and 6 𝑃𝑃 = [0.2, 0.2, 0.2]𝑇𝑇.
• List the code in the submission and provide the source code (.py) as an accompanying submission.
Hire a Professional Essay & Assignment Writer for completing your Academic Assessments
Question 2 (25 marks)
(a) Inverse kinematics is essential to designing a controller of the robotic system. Perform numerical calculation for inverse kinematics of the planner three-link manipulator whose algebraic solution procedure is given in Textbook Section 4.4. Figure Q2 shows the mechanism of the three-link planar manipulator and its link parameters. In the figure, the base frame {𝐵𝐵} is shown as Frame {0}, and the wrist frame {𝑊𝑊} is shown as Frame {3}. The following fixed-length parameters are given: 𝐿𝐿1 = 1 𝑚𝑚, 𝐿𝐿2 = 1 𝑚𝑚, and 𝐿𝐿3 = 1 𝑚𝑚. The homogeneous transformation of the wrist frame relative to the base frame ( 𝑇𝑇𝑊𝑊 𝐵𝐵 ) is given by
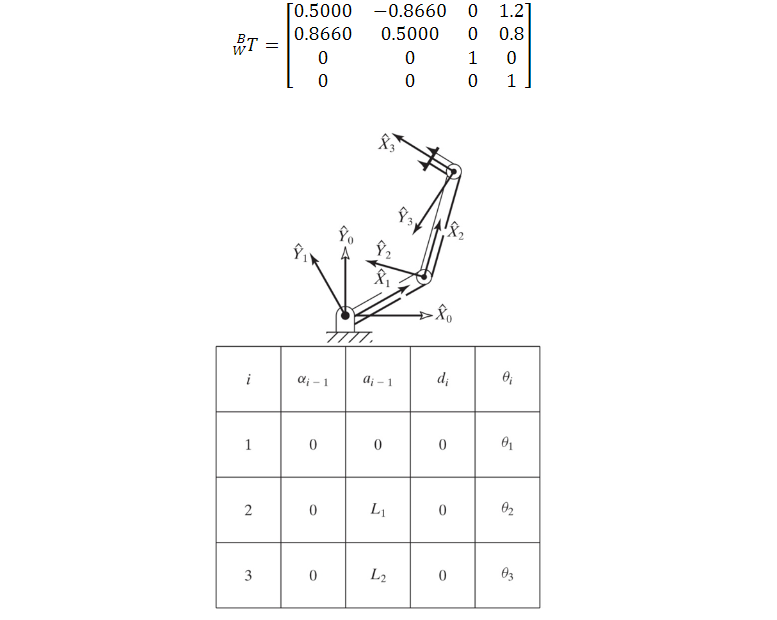
Figure Q2: Three-link planar manipulator and its link parameters.
(i) Interpret the geometrical meanings in the following matrix and vector that are equipped with numerical entities.
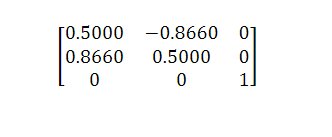
and

(ii) Present a pseudocode in Python or Matlab style to show the procedure to calculate joint variables 𝜃𝜃1, 𝜃𝜃2, and 𝜃𝜃3. You are welcome to develop a true code to calculate the number values.
(iii) Solutions for 𝜃𝜃1, 𝜃𝜃2, and 𝜃𝜃3 can be obtained from the given numerical entities in 𝑇𝑇𝑊𝑊 𝐵𝐵. However, another set of numerical entities in 𝑇𝑇𝑊𝑊
𝐵𝐵 might not yield solutions from the calculation. Explain your understanding of the non-solution issue.
(b) The inverse kinematics analysis is sometimes not as forward as that in a forward kinematics analysis. There is no general approach that can be applied to different manipulator mechanisms. The solution procedure in Textbook 4.7 for the PUMA 560 example demonstrates several patterns or manipulations that may inspire a solution procedure for another mechanism. Summarize what you have learnt from the example for an inverse kinematics analysis. You may use bullet points with text less than 400 words and only necessary equations.
Buy Custom Answer of This Assessment & Raise Your Grades
Question 3 (20 marks)
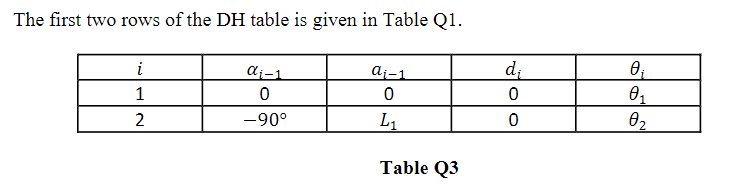
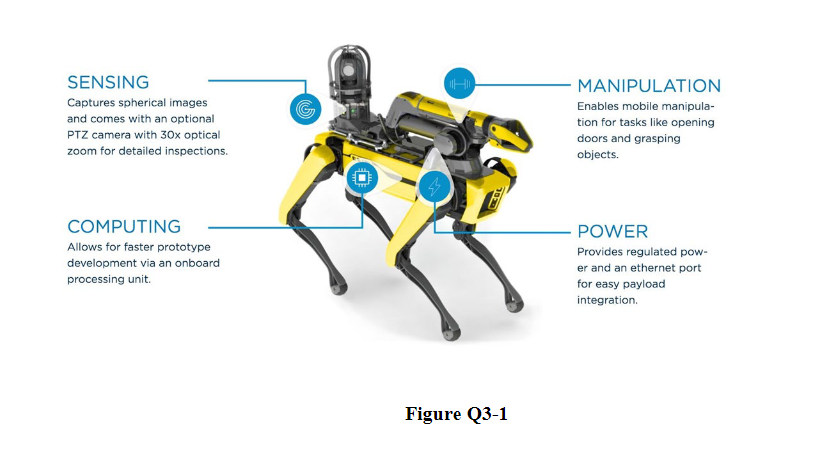
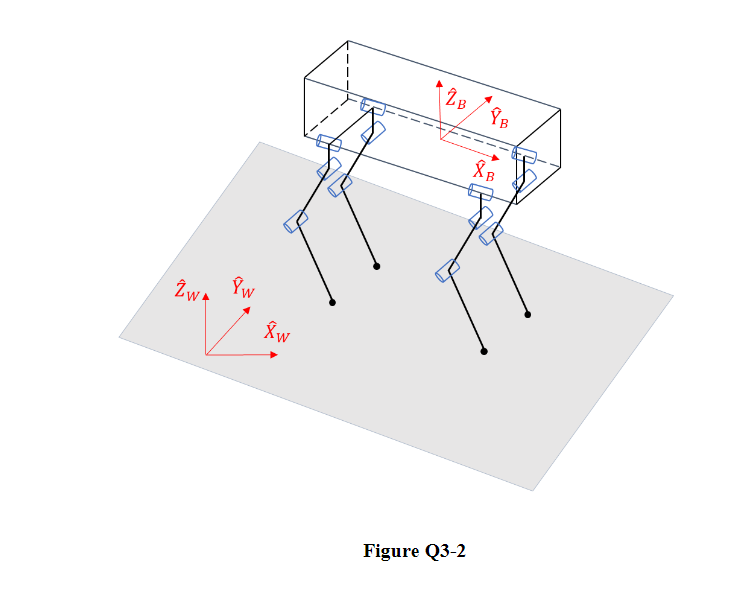
Figure Q3-1 shows Boston Dynamics’ Spot which is a quadruped robot available on the market. The schematic model of a quadruped robot is shown in Figure Q3-2. The robot has a torso and four legs. Each leg has three joints, i.e., a rolling rotary joint at the root for side swing, a pitching rotary joint in the hip, and a pitching rotary joint in the knee. The base frame {𝑊𝑊} and the body frame {𝐵𝐵} are assigned as shown in the figure.
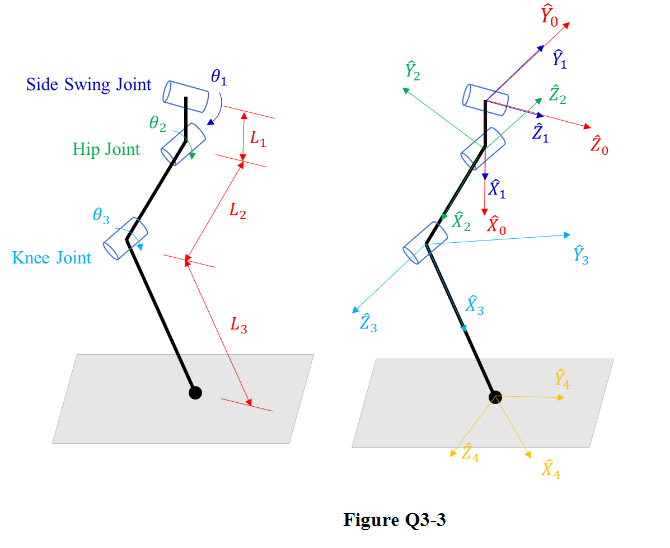
For kinematic analysis, each leg can be retreated as a robot arm. The three joints are revolute. Joint 1 rotates about an axis along the longitudinal direction, while Joints 2 and 3 rotate about the transverse direction. The end-effector of the robot arm is the foot which has a spherical structure to adapt to different terrains. As shown in Figure Q3-3, Frames {0} to {4} are assigned to the base, the three joints, and the end effector respectively.
It is noted that Frame {4} is defined in accordance with Frame {3} with a translation. The axes 𝑍𝑍̂2, 𝑍𝑍̂3, 𝑍𝑍̂4 are in parallel, while 𝑍𝑍̂0 and 𝑍𝑍̂1 axes are perpendicular to 𝑍𝑍̂2, 𝑍𝑍̂3, 𝑍𝑍̂4 axes. It is also noted that axes 𝑋𝑋�2, 𝑌𝑌�2, 𝑋𝑋�3, 𝑌𝑌�3, 𝑋𝑋�4, 𝑌𝑌�4 are coplanar.
(a) Appraise the assignment of 𝑋𝑋1 in the given direction of the figure.
(b) Appraise the assignment of 𝑍𝑍̂2 in the given direction of the figure.
(c) Obtain the 3 4 𝑇𝑇 matrix directly based on your observation from the frame assignments and your understanding of the structure of a homogenous transform.
(d) The force component acting on the foot is expressed in Frame {4} as 4 𝐹𝐹 = �𝑓𝑓𝑥𝑥 𝑓𝑓𝑦𝑦 0� 𝑇𝑇. Examine the components expressed in Frame {3}, that is, 3 𝐹𝐹.
(e) Calculate the torque acting at Joint 3 due to the force acting on the foot.
(f) Assume that at Frame {3}, the linear velocity 3 𝑣𝑣3 and the angular velocity 3 𝑤𝑤3 are known. Formulate the equations to calculate the linear velocity 4 𝑣𝑣4 and the angular velocity 4 𝑤𝑤4.
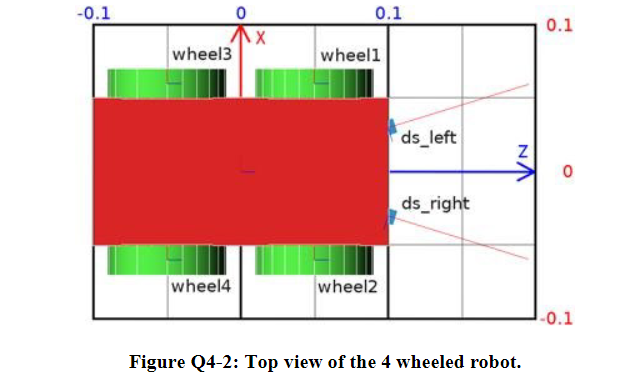
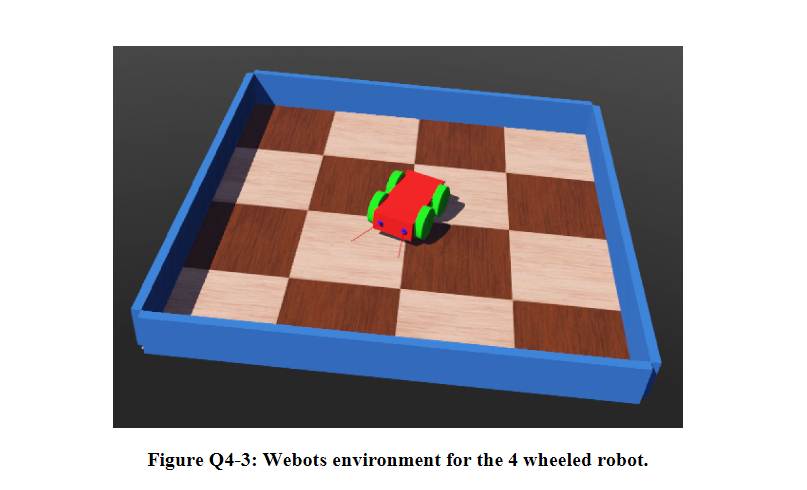
Question 4 (25 marks)
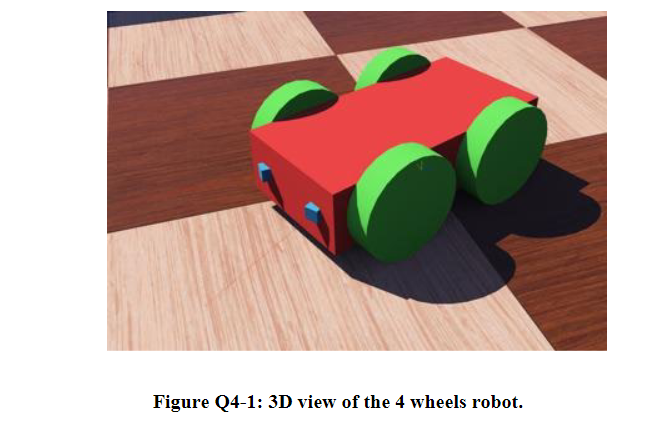
(a) Following the Webots Tutorial 6 to design and develop a four-wheel robot model from scratch (source: https://cyberbotics.com/doc/guide/tutorial-6-4-wheels-robot?tab- language=python).
Requirements:
• You can follow the recorded tutorial to develop the model and experiment with the controller code. However, your submitted project should be your independent work.
• The steps of using nodes of floor and walls to create a simulation environment are not covered in Tutorial 6. You can refer to the relevant information in Tutorial 2.
• Compress the entire project folder into a zipped file and submit the zipped file to the accompanying channel.
(b) Study the Python code for the controller and summarize your understandings. Requirements:
• You can comment on the codes to demonstrate the purpose of a specific line.
• You can present what you have learnt from this controller code in paragraph.
Question 5 (15 marks)
This question is a follow-up of TMA01 Question 7 where you were required to present a proposal to design the robotic system. In TMA02, you are further required to present some thoughts on how you can use Webots to develop a prototype of your proposal.
The requirements of this open-ended question are listed below:
• Firstly, discuss how you can take advantage of the available resources offered by Webots in your prototype development.
• You can then focus on one technical part, for example, how to implement (add) a controller, a sensor, or an actuator in your system to demonstrate your understanding of the software.
• Limit the maximum length of this section to 1000 words.
• You are required to cite the references in your study. Direct adoption of contents from an open resource or an AI generative resource is strictly prohibited.
Stuck with a lot of homework assignments and feeling stressed ? Take professional academic assistance & Get 100% Plagiarism free papers
Are you a SUSS student struggling with your EAS401 Robotics Mechanics and Control Assignment in Singapore? Don't worry; we're here to assist you! With our TMA and individual assignments services, along with top-notch assignment writing service in Singapore and dedicated Case Study Writing Help, you can now pay our experts to get the course help you need. Let us handle the challenging aspects while you focus on success. Your academic journey just got a whole lot easier.
- Imagine that you are currently working for a precision medicine startup: Machine Learning Paper Review in Precision Medicine, Written Assignment 1, NUS, Singapore
- Go Business offers PSG solutions for enterprises in Singapore: Collective Intelligence and Entrepreneurship, Assignment 1, JCU, Singapore
- Design an ontology based on- Accidents can be categorised as chemical, electrical, fire, kinetic or liquid: Collective Intelligence and Entrepreneurship, Assignment 1, JCU, Singapore
- Project Control Monitoring, Assignment, HU, Singapore: Deliberate Project MONITORING AND CONTROL or PMC Identification
- DSM500: Final Project Report, Coursework 2, UOL, Singapore
- DSM080: Financial Markets, Assignment, UOL, Singapore: A grapefruit juice futures contract is for 15,000 pounds of frozen grapefruit juice
- DSM080: Financial Markets, Assignment, UOL, Singapore: The share price of a certain stock today is $42.50, and five-month European style call options with a strike price of $45 currently sell for $4.25.
- DSM080: Financial Markets, Assignment, UOL, Singapore: A trader who is working in the gold markets is able to borrow money at the interest rate of 7% per annum
- DSM080 Financial Markets, Assignment, UOL, Singapore: A dollar-based American corporation has decided that it will have to pay 6 million UK pounds in three months
- Principle of Finance Assignment, UCD, Singapore: National Gaming Inc. (National) operates the weekly lottery in the country
UP TO 15 % DISCOUNT