EPE3200: State Space Analysis and Controller Design Home Work, NU, Singapore: Analyze and design a controller for the inverted pendulum shown in the figure
| University | Newcastle University (NU) |
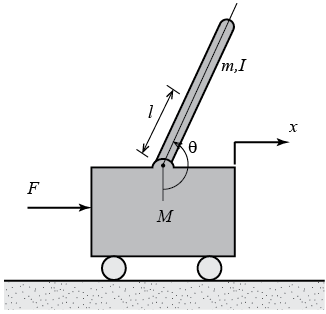
In this assignment, you will model, analyze and design a controller for the inverted pendulum shown in the figure. You will apply the principles learned in the model to accomplish the tasks and prepare a report that you will be submitting at the end of the trimester. The parameters of the inverted pendulum system are as follows:
Mass of the cart (M): 0.5 kg
Mass of the pendulum (m): 0.2 kg
Coefficient of friction for cart (b): 0.1 N/m/sec
Length to pendulum center of mass (l): 0.3 m
Mass moment of inertia of the pendulum (I): 0.006 kg.m^2
Buy Custom Answer of This Assessment & Raise Your Grades
Tasks
- Obtain the model of the system in State Space form.
- Obtain the equilibrium point and linearize the model around the equilibrium point.
- Design a pole placement controller that can drive the cart to follow a step reference input while keeping the pendulum upright.
- Design an LQR controller for the task in (c) and compare both approaches.
- Assuming that the speed of the cart and angular speed of the pendulum is not measured, derive a state observer that can estimate those signals and use the observer in parts (c) and (d).
Hire a Professional Essay & Assignment Writer for completing your Academic Assessments
Are you stuck with your EPE3200 State Space Analysis and Controller Design Homework and looking for the best homework writing help in Singapore? Look no further, at Assignment Help Singapore we have a team of skilled writers who can assist you and complete your homework in a 100% error-less manner at a very cheap price.
- PP0542 Professional Practice and Career Development Assessment Brief 2026
- BBS2025 Computational Thinking for Business Individual Assignment 2026
- COM203 Consulting and Freelancing Assignment Brief 2026 | Murdoch
- HR9516 Human Resource Management Essentials Assignment 1, 2026
- HR9537 Management Research and Analysis Assignment Brief 2026
- A4750C Good Dispensing Practice Graded Assignment Questions 2026
- ECAT101 Airport Systems Assessment Brief 2026 | Temasek Polytechnic
- S2450C Health Promotion Graded Assignment 2026 | Republic Polytechnic
- BUS303 Taxation Assignment Team Project Question 2026 | Murdoch University
- NX9624 Management Enquiry Assessment Brief 2026 | Northumbria University